3.2 系统的软件设计
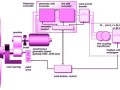
本系统的主要功能都是由PLC来实现的,当满足风力机起动条件时,PLC发出指令使叶片桨距角从90°匀速减小;当发电机并网后PLC根据反馈的功率进行功率调节,在额定风速之下保持较高的风能吸收系数,在额定风速之上,通过调整桨距角使输出功率保持在额定功率上。在有故障停机或急停信号时,PLC控制电磁阀J-A和J-C打开,J-B关闭,使得叶片迅速变到桨距角为90°的位置。
风力机起动时变桨控制程序流程如图4所示。当风速高于起动风速时PLC通过模拟输出单元向比例阀输出1.8V电压,使叶片以0.9°/s的速度变化到 15°。此时,若发电机的转速大于800r/min或者转速持续一分钟大于700r/min,则桨叶继续进桨到3°位置。PLC检测到高速计数单元的转速信号大于1000r/min时发出并网指令。若桨距角在到达3°后2分钟未并网则由模拟输出单元给比例阀输出-4.1V电压,使桨距角退到15°位置。
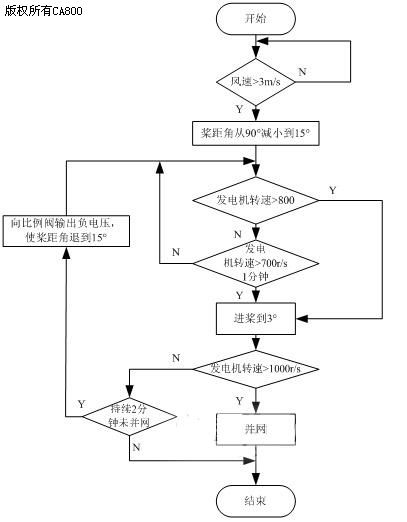
图4 风力机起动变桨控制程序流图
发电机并上电网后通过调节桨距角来调节发电机输出功率,功率调节程序流程图如图5所示。当实际功率大于额定功率时,PLC的模拟输出单元CJ1W- DA021输出与功率偏差成比例的电压信号,并采用LMT指令使输出电压限制在-4.1V(对应变桨速度4.6°/s)以内。当功率偏差小于零时需要进桨来增大功率,进桨时给比例阀输出的最大电压为1.8V(对应变桨速度0.9°/s)。为了防止频繁的往复变桨,在功率偏差在±10kW时不进行变桨。
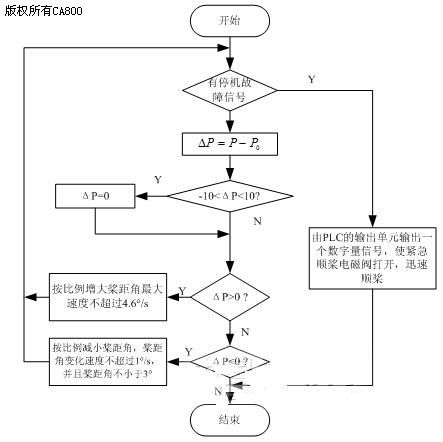
图5 变桨调功程序流程图
<上一页34余下全文