1.单目融合
这个是在5/6系和X系列车型上面,使用单目与Radar融合的产物。
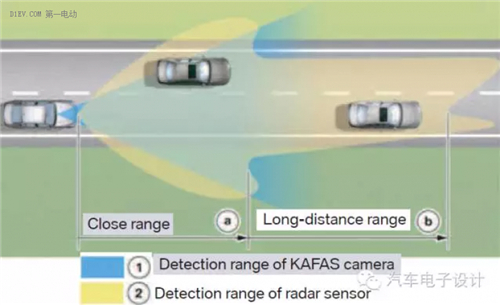
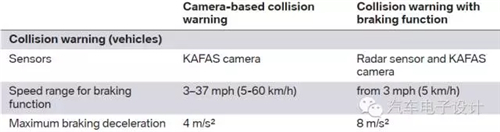
这里倒是罗列了有没有雷达的区别,主要体现在减速范围上,在这个功能里面,视觉起到的作用其实挺大的,可以很好的区分前方车辆的实际情况,距离控制本身还是以雷达为主。
备注:这里很难区分出视觉ACC和视觉+Radar ACC里面的性能区别。
2.双目融合
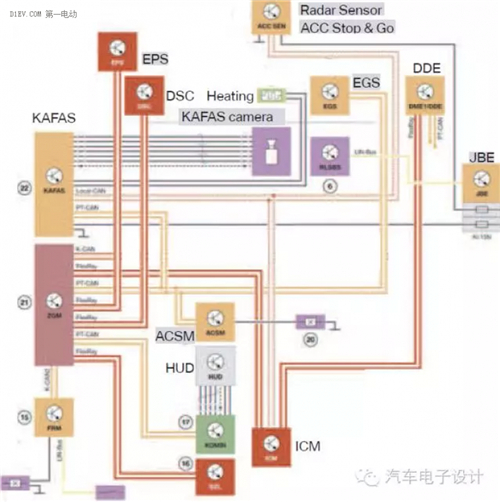
由于双目的系统是镜头、处理器封装在一起,通过以太网与FRR的雷达还有SAS进行连接,主体的算法可以在不同情况下做不同的处理。
KAFAS双目通过车辆后部检测、提取道路信息、车辆位置
通过融合确定道路线、禁止车辆还有固定设施
这明确提出可以在多车道高速公路、普通公路以及城市主干道和环道上进行,检测物体里面也包含了摩托车。
3


