
五部门关于开展2024年新能源汽车下乡活动的通知
VSI Labs验证的1550nm LiDAR或解“大货车”之殇
来源:新能源汽车网
时间:2021-09-30 16:07:30
热度:
VSI Labs验证的1550nm LiDAR或解“大货车”之殇文︱立厷图︱网络在所有增强传感和目标检测的汽车传感器中,激光雷达是迄今为止最复杂和最多样的选择。每种激光雷达中部署的
文︱立厷
图︱网络
在所有增强传感和目标检测的汽车传感器中,激光雷达是迄今为止最复杂和最多样的选择。每种激光雷达中部署的技术不仅光源不同,在测距和成像方法上也不一样。一些成熟的激光雷达(如905nm)正在实现量产,而被认为更有前景的新的激光雷达技术(如1550nm)的研发或概念验证也是层出不穷。当然,其成本、尺寸和性能上差异很大。
专注于主动安全和自动控制技术的应用研究公司VSI Labs从2018年前就开始跟踪一家名为AEye的激光雷达公司,最近又一次对AEye的iDAR™(智能探测和测距)传感器进行了性能测试,结果看上去的确很美!
市场在寻找什么?
越来越多的激光雷达玩家(估计有百八十家)令市场拥挤不堪,并购活动猖獗。一些公司为了续命,选择SPAC(特殊目的收购公司)开启上市里程。故事远不止如此,激光雷达公司追求的技术不同,主机厂和Tier 1在应用部署愿景上也有分歧。
不同激光雷达使用不同的光源,大多数激光雷达制造商使用905nm边缘发射器(EEL)和雪崩光电二极管(APD),因为这些组件很容易量产。一些激光雷达已开始使用1550nm全光纤激光源,但降低成本是一个挑战。1550nm激光器在不影响眼睛安全的情况下更能实现更长射程,解决困扰905nm激光器低分辨率及射程短,对眼睛也不安全的问题。
不同的技术都在寻求设计导入。Yole固态照明系统高级技术与市场分析师Pierrick Bouley认为:“尽管技术如此不同,传统技术仍然代表着汽车行业的大多数设计导入。至于波长,1550nm对人眼的危害比905nm小,主要通过硅平台集成,但目前后者却代表了汽车行业65%的设计导入。”原因很简单,尽管1550nm激光雷达在雨雾天气有更大优势,但905nm的优势主要是成本。
在成像方法方面,传统机械扫描仍占设计导入的69%。MEMS微镜和闪光激光雷达也正在进入汽车领域,未来有望增加。
由于成本原因,EEL的905nm波长仍然是制造商的首选,基于1550nm的激光雷达正在赢得市场。FMCW(调频连续波)OPA(光学相控阵)激光雷达都适用于1550nm相干检测和径向速度测量。Yole认为,FMCW和OPA将成为机械式或MEMS扫描的替代品。
不过,本文开头提到的AEye却说:在成本、测距范围、性能和点云质量前提下,激光发射频率高、扫描快速的脉冲ToF(飞行时间)系统比FMCW系统更能有效满足自动驾驶汽车激光雷达的需求。这家由洛克希德?马丁公司领先技术专家于2013年Luis Dussan创建的公司,利用仿生学和军方用于扫描环境的自动瞄准应用原理,为自动驾驶车辆提供军用级性能。其产品是1550nm固态自适应激光雷达,基于其独特的专利MEMS技术。

图:Aeye的技术位置
测试结果看上去很美
由VSI Labs监督的AEye iDAR系统的性能测试重点是安全和自主应用。测试的四个性能指标结果显示:
①距离:在超过1000米、帧速率10Hz(每秒10帧)情况下,AEye传感器能够检测到目标相当多点数。通过提供超过传统激光雷达4倍的距离和5倍的检测数,AEye的系统在高速公路速度下具有独特的停车和避让能力。
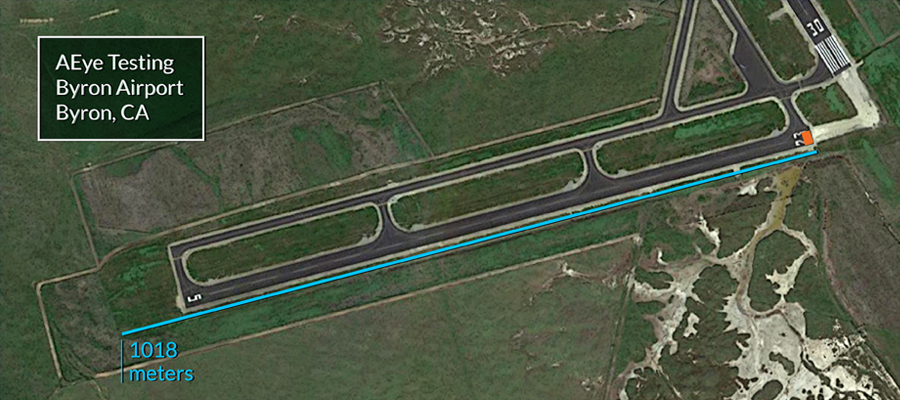
图:测试现场
②分辨率:在距离为200米的视野(FOV)内任何物体上达到每平方度1600个点,提供超高分辨率,使车辆能够快速准确地识别和分类威胁,尤其是小型物体。捕获预分类属性是常规激光雷达的5倍,支持更快、更准确的感知和路径控制。

图:200米点云图像
③速度:FOV扫描速度为10Hz至200Hz(每秒200帧),通过以传统激光雷达10-20倍的速度扫描,AEye的系统提供了扫描行人或车辆横向进入的独特能力,并提高了目标跟踪的准确性和一致性。
④传感器集成灵活性:安装在第一个表面(包括挡风玻璃)后,可观察到的性能下降不到10%,能够将传感器放置在第一个表面(如挡风玻璃或格栅)后,以最小的性能影响实现主机厂在其设计中的灵活性,而不会影响美观或改变车辆的空气动力学。

图:测试条件
根据研究结果,VSI Labs确定AEye的iDAR系统“实现了射程超过4倍,分辨率超过5倍,扫描速度超过目前市场上激光雷达设备的10倍,可供自动车辆使用。”
iDAR聪明在哪里?
Aeye自诩为智能下一代自适应激光雷达的主要供应商,倡导“像机器人一样思考,像人类一样感知”,主要研发车辆自主、高级驾驶员辅助系统(ADAS)和机器人视觉应用。AEye的iDAR? 系统利用仿生学和军方用于扫描环境的自动瞄准应用原理,智能关注最重要的内容,实现更快、更准确、更可靠的感知。据称,iDAR? 是唯一具有集成确定性人工智能的软件配置激光雷达,在距离、分辨率和速度方面性能领先。
传统激光雷达的问题
传统激光雷达被动和缺乏智能,不考虑条件如何演变,也不知道如何平衡相互竞争的优先级,常常给每个像素分配相同的优先级,导致对复杂或危险情况反应不佳。传统激光雷达只是不分青红皂白地收集有关环境的数据,并将其传递给中央处理器,其中75%到95%的数据由于冗余或无用而被丢弃。这对询问时间、带宽和处理造成了巨大的压力,导致了延迟。
超越人类的人工感知技术
到目前为止,没有什么能比人类视觉皮层接收更多的信息并更快、更准确地处理这些信息。人类以高达27Hz的速度对复杂物体进行分类,大脑在13毫秒内可处理5.8亿像素的数据。传统激光雷达的平均帧速率和重访速率(revisit rate)约为10Hz,而iDAR传感器可实现超过100Hz的帧速率(高于人类视觉3倍),以及大于500Hz的物体重访速率。iDAR模拟人类视觉皮层,关注和评估车辆周围环境、驾驶条件和道路危险的方式,以实现更智能、更准确的决策,从根本上提高检测概率和分类准确性。
从人工感知中剔除猜测
AEye首席科学家Allan Steinhardt博士说:“iDAR将猜测从人工感知中剔除,只使用可操作的数据。”
iDAR结合了固态自适应激光雷达、可选融合的微光高清摄像头和集成的确定性人工智能,以更少的数据捕获更多智能信息,实现更快、更准确和更可靠的感知。其收集的信息是传统固定模式激光雷达的4至8倍,但它减少了90%以上传输到运动规划系统的不相关数据量,同时将功耗降低了5至10倍。
一个询问点很少能提供足够的信心——它只是暗示。这就是为什么激光雷达系统必须捕获同一物体的多次探测以完全理解它是什么,这使得后续询问/探测的速度(物体重访速率)比单独的帧速率对自动驾驶车辆的安全性更为关键。传统激光雷达的对象重访速率就是帧速率。
iDAR不仅能够在单个帧内重访对象,还可以重访多个感兴趣的点/对象。对感兴趣物体的可实现微秒到几毫秒的物体重访速率,比传统激光雷达的数百毫秒快3000倍。
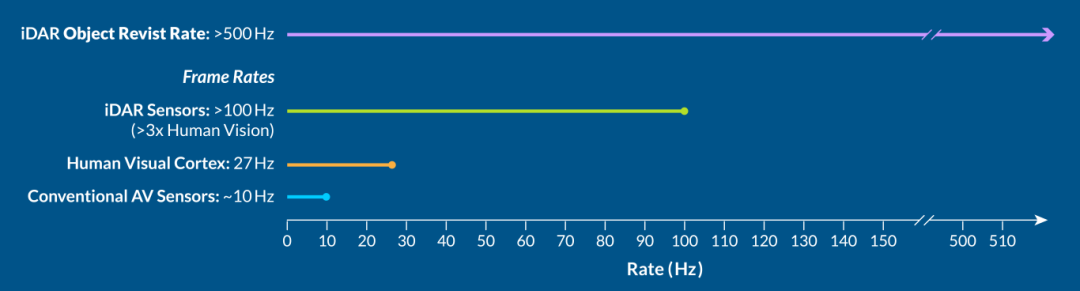
图:重访速率的差距
缩短同一帧内对象检测之间的时间也至关重要,因为较短的对象重访时间可以降低与场景中多个移动对象相关的高级算法的处理时间。
iDAR的智能是用获得专利的双基地(bistatic)架构实现的,它将发射和接收通道分开,允许iDAR对两者进行优化。随着每一个激光脉冲的发射,接收器被告知何时何地寻找其返回信息,从而在采集点将确定性人工智能引入传感过程。因此iDAR就成为了一个自适应平台,能够专注于车辆环境中最重要的内容。
自适应激光雷达技术
Aeye的iDAR的一种自适应激光雷达,能够较小的外形尺寸提供极快的扫描能力和固态可靠性。其模块化架构只占现有传感器成本的一小部分,且设计“经得起未来考验”,可以随着技术和应用需求的变化而不断发展。这使主机厂能够灵活配置AEye的产品,以满足汽车、工业、移动、铁路、卡车运输等领域的不同用例。
Aeye认为,我们生活在一个色彩斑斓的世界。从车道线到道路标志的驾驶基础设施都建立于对比鲜明的颜色线索。AEye的智能传感方法创造了捕捉摄像头像素和3D激光雷达体素(Voxel)的独特能力,可选集成摄像头生成真彩色点云,并联摄像头馈入(camera-only feed)提供了经济高效的冗余摄像头传感器,使车辆的视觉效果优于人类。其高级视觉能力解决了最具挑战性的极端案例(如众所周知的特斯拉“大货车”或蔚来“公路养护车”)。通过HD ROI(高密度感兴趣区域),比仅使用摄像头的系统精确定位和分类对象能力提高10-20倍。帧内径向及横向速度检测和对象分类可发现300米以上的行人、160米以上的低反射小物体。

图:可选2D摄像头和3D自适应激光雷达融合的Dynamic Vixel
这种新的、获得专利的数据对象称为Dynamic Vixel,它在采集点同时捕获RGB和XYZ数据。这种像素和体素的实时集成意味着数据可以在传感器级得到更快、更高效、更准确的处理,而不是后续处理。由此产生的内容使确定性人工智能能够使用2D、3D和4D信息评估场景,以识别位置、跟踪对象,并以较少的延迟、带宽和算力提供结果。
iDAR能够提供完整的场景覆盖,同时只收集和分析重要的数据,而不会遗漏任何内容。灵活的iDAR平台在数据收集过程中具有自适应目标定位和智能能力,可以提高整个场景分辨率,从而从根本上提高检测概率和分类精度。这种可扩展、软件可配置的方法允许系统以较少的数据捕获更多的智能信息,从而实现更快、更准确、更可靠的传感和路径规划,这是自动驾驶车辆安全落地的关键。
灵活的触发和响应模式
使用触发式iDAR,客户可以在设计时创建一个确定性的、软件可配置的扫描模式库,每个扫描模式都针对特定用例。针对地图、IMU(惯性传感器)、速度、倾斜、天气和车辆方向等触发传感器从一种扫描模式切换到另一种扫描模式。例如,客户可以为高速公路、市区和郊区驾驶创建不同的扫描模式,以及“出入匝道”模式。此外,客户还可以为相同的驾驶环境创建扫描模式,如针对恶劣天气优化的“公路雨水扫描模式”和“公路阳光扫描模式”。
使用响应式iDAR,可以在设计和运行时创建扫描模式。在这个级别,整个平台完全是软件可配置的,并具有情景感知能力,能够实时调整扫描场景、应用密度和额外功率,以及采用何种扫描速率。此时,反馈回路和其他传感器(如摄像头和雷达)通知激光雷达在整个场景的各个点上创建密集的动态ROI。它还可以动态改变扫描模式。响应式iDAR类似于人类感知,能够主动理解和询问场景,并不断优化自身的扫描模式和数据收集,以关注最重要的信息。
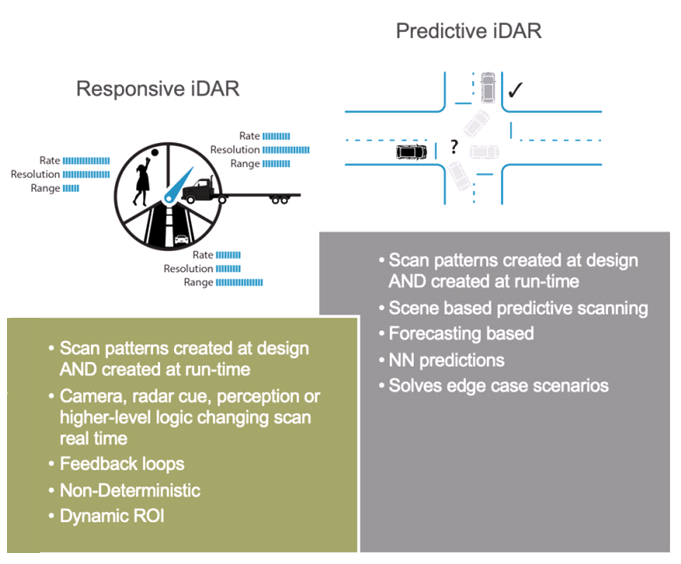
图:响应式和预测性iDAR
预测性iDAR采用响应式iDAR提供的内容预测未来,因此,它在询问的位置(和内容)方面更加智能。在这个层次,基本感知可以分布到传感器网络边缘。就像人类一样,预测性iDAR能够理解它所看到的一切运动,使系统用更少的数据传递更多的信息,将其能量集中在场景中最重要的对象上,同时关注周围的一切。预测iDAR的最终结果是通过神经网络进行运动预测。与人类的直觉一样,可以“感知”(即预测)未来不同时间目标的位置,使车辆能够应对最具挑战性的极端情况。
感知创新平台和产品
AEye的基本感知被分布到传感器网络边缘,实现实时数据收集,通过减少延迟、降低成本和确保功能安全来增强现有集中式感知软件平台。软件参考库Perception Advanced包括AEye的4Sight A(ADAS)和4Sight M(自主)传感器中的以下功能:
检测:以3D点云和摄像头识别物体(如汽车、行人等),精确估计其质心(centroid)、宽度、高度和深度,以生成对象的3D边界框。
分类:对检测到的对象类型进行分类,有助于进一步了解这些对象的运动特征。
实例分割:进一步对场景中的每个点进行分类,以识别这些点所属的特定对象。这对于准确识别更精细的细节尤其重要,例如道路上的车道分隔线标记。
跟踪:通过空间和时间跟踪对象,有助于跟踪可能与车辆路径相交的对象。
范围/方向:确定物体相对于车辆的位置及方向,有助于车辆将其周围场景背景化。
瞬时真实速度:利用敏捷激光雷达的优势捕获物体相对于车辆的运动速度和方向,为运动预测提供基础。
车道标记检测:对每种类型的车道标记进行检测和分类,确保车辆导航安全。
可驾驶区域:在下一个道路障碍物(如另一辆车、行人等)之前检测车辆前方空位,同时检测车辆两侧或其左侧或右侧车道上的车道标记。
运动预测:预测对象在未来不同时间的位置,有助于车辆评估碰撞风险并保证安全行驶。
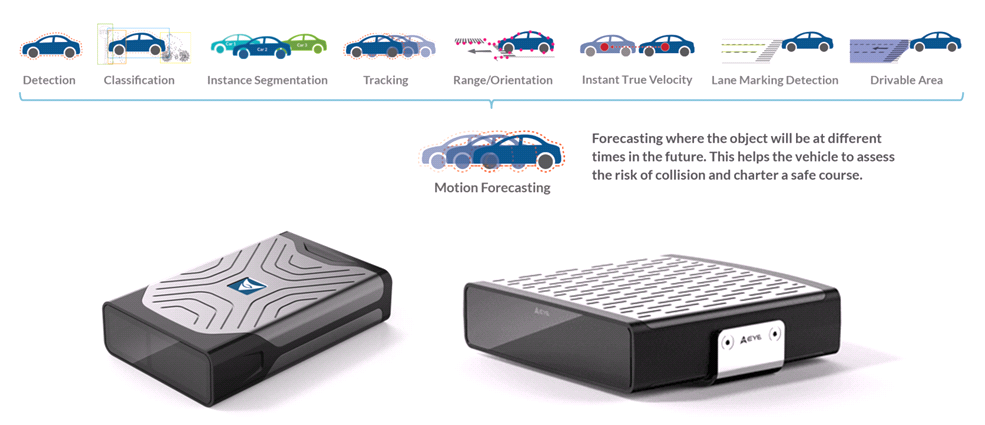
图:iDAR的感知功能及4Sight M和4Sight A
4Sight A系列是Tier 1合作伙伴为车辆整个生命周期制造和更新的产品,具有业界领先的远程ADAS性能,旨在满足高性能应用的需求。4Sight M则是一个经济高效、可定制的感知解决方案,利用完整的iDAR软件平台,并包括完整的SDK,用于实现自主出行的可扩展路线图。

图:4Sight M规格
一个平台,无限应用
由于采用模块化架构构建,并通过软件参考库提供的Perception Advanced,iDAR可以实现无缝、经济高效的360°覆盖定制。
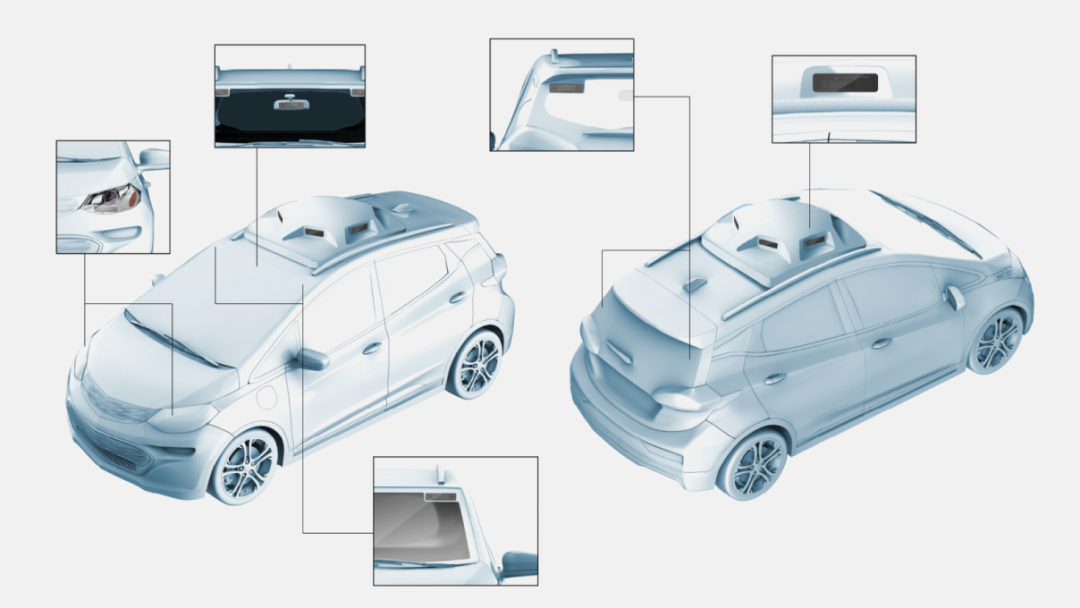
图:灵活定制
与其他高性能激光雷达相比,其定制成本低2-5倍,可以满足不同OEM的特定设计要求。生产封装选项包括车顶、格栅和挡风玻璃后面,可根据位置用软件来优化。

-
华为公开获取车辆3D信息专利2021-09-26
-
激光雷达+移动大床?小鹏P5哪款最值得购买?2021-09-26
-
华为公开获取车辆3D信息专利,自动驾驶专利申请超3万件2021-09-26
-
一个新的驾驶辅助时代或由小鹏P5开启,低成本激光雷达的春天来了吗?2021-09-26
-
激光雷达量产元年,ADAS将占最大细分市场,行业面临洗牌?2021-09-24
-
工信部辛国斌:加大新能源车推广力度 启动公共领域车辆全面电动化试点2021-09-17
-
工信部辛国斌:加大新能源车推广力度 启动公共领域车辆全面电动化试点2021-09-17
-
特斯拉又有新花样?“魔法”雨刷激光束是如何清理汽车玻璃上污渍的?2021-09-15
-
深圳打造国际氢能产业示范港,首批氢能示范车辆即将投运;近9452.88万元 深圳2020年度纯电动物流车运营资助项目审核结果公示2021-09-09
-
一种车辆区域识别超声波避障传感器2021-09-08
-
发放近9452.88万元补贴金额 2020年度纯电动物流配送车辆运营资助项目审核结果2021-09-07
-
工信部辛国斌:启动公共领域车辆全面电动化城市试点;3000辆三一电动重卡签约;橙心优选:11月或关掉全国业务......2021-09-07
-
机动车拍卖车辆市场结构分析:轿车独占六成2021-09-06
-
工信部辛国斌:将启动公用车辆电动化城市试点、编制汽车产业低碳发展技术路线图2021-09-05
-
【蓝皮书解读系列】车辆运行篇:新能源物流车日均行驶时长和行驶里程呈现逐年快速增长趋势2021-09-03