基本假设
为了推导运动方程作如下一些基本假设
(1)桨叶为troposkien形状,
(2)桨叶截面对主惯性轴,有气动中 心,弹性中心和重心。而弹性中心和质量中心 是重合的,
(3)桨叶截面垂直于弹心轴线(变形仍保持垂直于变形后弹性轴线),桨叶截面不受变形的影响。另外扭转变形被忽略。
(4)桨叶可在两个相互垂直干弹性轴方 向弯曲。
(5)偏转、拉伸和旋转变形是小量的,
(6)应用了准定常叶素片条理论;
(7)考虑了动失速和涡流的影响。
坐标系统
为了导出运动方程必须计算出任意点的相对速度。为此,桨叶上一点的旋转坐标与固定到塔上的惯性坐标之间关系,可通过一系列平移和转动的换算得到。根据这些坐标系统可直接计算出所有矩阵和力。然后根据广义坐标来表示运动方程。
这些广义坐标对应的自由度如下
(1)桨叶挥舞和摆振方向的位移 Ux=∑U i(x)BSiK
式中U;(x)。是桨叶第i阶特征模态,而SIl【是桨叶k第i阶振型广义坐标。
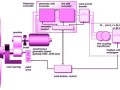
图l为参考坐标。
运动方程
运动万程
为了确定旋翼——塔耦合系统的运动方程应用了Lagrange原理,为了得到动能、势能和阻尼项,必须计算桨叶上任意点的速度,经过代数转换以后,以局部坐标s。表示其速度。
从这个方程可以计算桨叶能量项目,桨叶的变形代入这个方程,能量项目就可用广义坐标表示。用Lagrange方程最后导出运动方程,这些方程是一组常系数二阶微分方程,因为垂直轴风轮结构是对称的。气动弹性稳定性和动力响应运动方程分别是
式中
(m)是结构质量矩阵
(d)是结构阻尼矩阵
(g)是陀螺矩阵
(r)是气动阻尼矩阵
(k)是结构刚度矩阵
(G)是重力矩阵
(S)是几何刚度矩阵
(C)是离心力矩阵
(q)是气动刚度矩阵
3