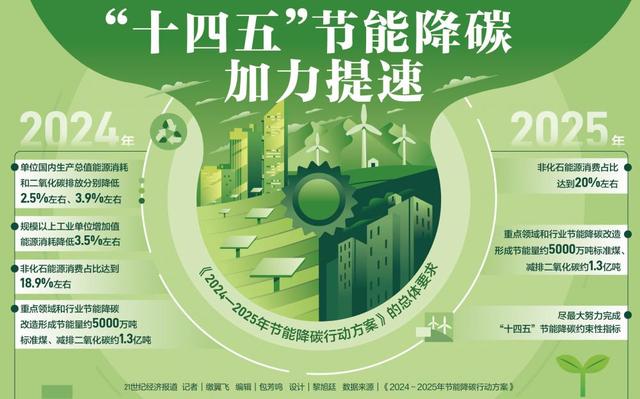
国务院关于印发《2024—2025年节能降碳行动方案》的通知
永磁交流伺服电机应用中需重点考虑的几个问题
来源:新能源网
时间:2018-09-04 20:47:29
热度:
永磁交流伺服电机应用中需重点考虑的几个问题 引言 由于永磁交流伺服电机具有响应快、功率密度大、效率高、运行平稳等特点,目前在自动化应用等行业领域得到了广泛的应用。但是在应用中,
引言
由于永磁交流伺服电机具有响应快、功率密度大、效率高、运行平稳等特点,目前在自动化应用等行业领域得到了广泛的应用。但是在应用中,很多工程师对永磁交流伺服电机绕组相序和编码器信号相序如何判别;电机关键参数kt和ke的意义及如何在工程计算中有效利用这两个参数;如何理解电机功率;工程应用上如何利用这些参数等问题存在困惑。因此本文针对对这些问题,从工程应用的角度出发进行了详细的阐述,以供读者参考。
永磁交流伺服电机的基本原理
pmsm的定子绕组结构为三相对称绕组,转子结构为表面贴装式永磁结构或内嵌式永磁结构,其绕组反电动势为正弦波,当给电机定子绕组通入三相对称的正弦波电流时,电机将产生连续的电磁转矩。pmsm的转子永磁体在工作气隙内产生接近正弦波的磁场,所以转子转动时就在电枢绕组上感生接近正弦波的反电动势。pmsm的三相电枢绕组与180导通型半桥逆变电路相连接,驱动电压是经由空间矢量脉宽调制的脉冲电压。电动机运行时,三相电枢绕组同时接通,在工作气隙内产生“连续式”圆形旋转磁场。为了实现伺服控制,pmsm的位置传感器可以采用旋转变压器或光电编码器,目前工业应用较多的是增量式光电编码器。伺服驱动的编码器一般需要两组信号
1)a,b,z信号,其中a,b两路脉冲相位差90,这样可以方便的判断电机转向;z信号,则每转输出一个脉冲,用于基准点定位(目前雷赛伺服不需要z信号)。
2)u,v,w信号三路脉冲信号彼此相位差120,每转所发出的脉冲个数与电机极对数一致。根据u,v,w信号的高低电平关系就可以判断电动机转子现在的位置。
在电动机启动前,根据u,v,w三路脉冲信号电平高低关系就可以估算出电动机磁极现在的位置。一旦电机旋转起来,a,b信号则可精确检测出转子位置角度。
目前的主流pmsm伺服驱动基本都采用矢量控制技术,系统框图如图1所示。
永磁交流伺服电机的相序如何定义或判别
在pmsm伺服电机的生产过程中,需有一道重要装配调试工序来确保电机三相绕组反电动势与编码器信号u,v,w的合适相位关系,具体解释如图2、3、4、5所示。
永磁交流伺服电机的kt和ke
1)永磁电机的反电动势常数ke
只要电机在转动,必然会有线圈切割磁力线,所以会有反电动势产生。对于具体的某型号电机,其转动速度越快,则产生的反电动势电压越高。也即反电动势电压与电机转速成正比。反电动势常数ke 就是用来表示这种比例关系的。
ke=e/n(式中e为反电动势,单位为v;n为电机转速单位为krpm)。


-
2012-2016年中国新能源汽车电机市场容量将超5百亿元2024-08-16
-
英国风能发电量创新高2024-08-16
-
合肥首个风能发电项目获核准2024-08-16
-
电机控制是新能源汽车的关键2024-08-16
-
我国首台350MW高背压热电机组正式开工建设2024-08-16
-
我国首台350MW高背压热电机组正式开工建设2024-08-16
-
2020年中国在运核电机组将达到5800万千瓦2024-08-16
-
越南男子发明南瓜形风力发电机 可为家庭供电2024-08-16
-
韩文科:发展太阳能及风能发电并网2024-08-16
-
如东海上风电场成大型风电机组试金石,华锐风电赢业主首肯2024-08-16
-
福建省火电机组讲述“近零排放”之路2024-08-16
-
国华电力煤电机组超低排放建设调查2024-08-16
-
北美市场对风力发电机系统及元器件的要求2018-09-04
-
美最新便携式风力发电机研制成功2018-09-04
-
几种双馈式变速恒频风电机组低电压穿越技术对比分析2018-09-04