
五部门关于开展2024年新能源汽车下乡活动的通知
一种BLDCM反电动势过零检测方法
来源:新能源汽车网
时间:2016-06-13 19:12:09
热度:
一种BLDCM反电动势过零检测方法 摘要:针对传统直流无刷电动机控制系统电动机转子位置检测准确度不高的状况,介绍了一种基于DSP的无位置传感器直流无刷电动机控制系统的硬件电
摘要:针对传统直流无刷电动机控制系统电动机转子位置检测准确度不高的状况,介绍了一种基于DSP的无位置传感器直流无刷电动机控制系统的硬件电路组成和软件结构。通过对无刷直流电机转子位置检测研究,提出了以TMS320F2812芯片为内核的综合转子位置检测方法,通过软件算法来得到电机转子位置信息,从而在改善系统调速性能的情况下降低系统成本。
1 引 言
直流无刷电动机控制系统所取得的高性能主要依赖于电动机转子位置检测信号的准确性,在实际生产过程中,往往很难得到电动机转子位置的准确信号。无位置传感器的直流无刷电动机控制系统是在不采用物理传感器的条件下,利用电机的电压、电流信息,通过软件算法来得到电动机转子位置,可以在改善系统调速性能的情况下,进一步降低系统的成本。针对这一情况,文中提出了一种全新的基于DSP的无刷直流电机控制方法,即无刷直流电机转子检测方法一综合转子位置检测方法,以达到较佳的位置测量;通过DSP强大的处理及运算能力和软件的优化设计,获得准确的位置信号从而精确地控制电机。
本文针对以往的反电动势过零检测电路复杂,延时时间难以补偿等不足,结合TMS320F2812运算速度快的特点,提出一种基于DSP的新的反电动势过零检测方法。
2 无刷直流电机控制硬件设计
普通的无刷直流电机采用三相逆变器供电,其绕组具有梯形波反电动势和方波电流,每相绕组通电120。电角度,无刷直流电机在正常导通期间只有两相绕组通电,另外一相绕组断开,因为断开相绕组中没有电流流过,因此其端电压反映了该相绕组反电动势的大小,而反电动势的过零点领先该相绕组换相信号30。电角度。
系统采用PwM调速方式,主功率电路是三相全桥星形电路。电机运行以“两相导通三相六状态”方式运行。控制策略以DSP为核心处理系统的速度数字PI闭环控制、相位判断和补偿等功能,转子位置检测采用反电动势过零检测。
利用TMS320F2812芯片,加上必要的外围电路,构成最小DSP系统,如图1所示。该电路的基本原理是:其中PWM信号利用DSP自带的6路独立PWM波,由PWM1~PWM6个引脚得到输出控制的PWM波形;电流采样信号通过ADC端口输入;3路位置传感器输出经电阻分压后接至DSP捕获单元,作为反电动势过零检测信号;PWM波形经驱动电路放大,然后由驱动电路按要求的馈电顺序开/关IGBT,实现对BLDCM相应的定子绕组正确馈电。
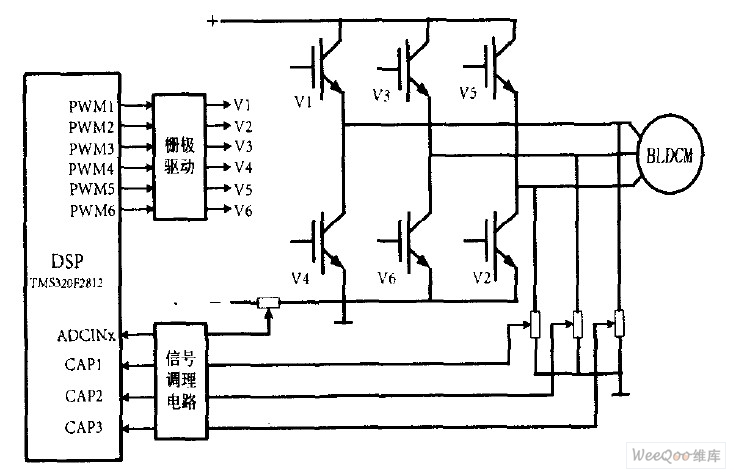
图1 系统原理图
全文PDF下载:一种BLDCM反电动势过零检测方法.pdf
来源:小松鼠

-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
一种新型电池组单体电池电压检测方法2016-06-15
-
关于电感元件的反电动势2016-06-13
-
如何正确保养纯电动汽车电池?2016-06-10
-
纯电动汽车在中国真的会火吗2016-06-10
-
年产20万辆纯电动汽车项目在赣州开工 年产值可达240亿元2016-04-29
-
广汽2016年主推插电式混动和纯电动汽车2016-03-24
-
纯电动汽车与氢燃料电池汽车发展所面临的问题2016-03-18
-
纯电动汽车成为驱动汽车产业发展新动能 将迎来新一轮蓬勃发展2016-03-16
-
华泰纯电动汽车iEV230上市 售价21.35万起2016-03-14
-
北汽新能源欲借上海再度发力纯电动汽车分时租赁2016-03-07
-
纯电动汽车总数 破2万辆2016-01-19
-
奇瑞S18纯电动汽车2015-12-18
-
长城腾翼C20纯电动汽车2015-12-18