
五部门关于开展2024年新能源汽车下乡活动的通知
解决 MIPI M-PHY 连接挑战以实现更高效的测试
来源:新能源汽车网
时间:2023-03-14 20:23:30
热度:
解决 MIPI M-PHY 连接挑战以实现更高效的测试随着行业转向采用MIPI 联盟的 M-PHY 标准,设计人员正面临一些与示波器测量相关的重大挑战,更具体地说,是探测。这些挑战
随着行业转向采用MIPI 联盟的 M-PHY 标准,设计人员正面临一些与示波器测量相关的重大挑战,更具体地说,是探测。这些挑战包括严格的要求,例如总线端接和输入回波损耗,以及需要限度地减少被测设备 (DUT) 上的共模负载和信号保真度要求,例如宽带宽、低噪声和高灵敏度。
本文的目的是提供信息,以增加您获得准确和可重复测试结果的机会,以确保符合标准。我们将首先回顾与示波器探测相关的 M-PHY 标准要求,讨论 M-PHY 物理层一致性测试套件 (CTS) 中所需的测试,并提供使用当前可用的示波器和探头进行 M-PHY 探测的实际示例.
M-PHY 总线操作/模式
MIPI M-PHY 标准支持不同的速度模式、高速 (HS) 和低速 PWM 和 SYS 模式,每种模式具有不同的数据速率或 GEAR。在 HS 模式下,规范针对 GEAR 1 (~1.5 Gb/s)、GEAR 2 (~2.9 Gb/s) 和 GEAR 3 (~5.8 Gb/s) 发布。
为了提高来自不同制造商的 MIPI M-PHY 设计一起使用时工作的可能性,MIPI 联盟建议针对 M-PHY 物理层一致性测试套件 (CTS) 对设计进行测试。随着 GEAR 4(~11.6 Gb/s)规范的开发,测试一致性变得越来越具有挑战性。
未端接和端接模式
M-PHY 标准中指定的电压测量假设总线具有连接在 M-PHY 发射器 (M) 的正 (TXDP) 和负 (TXDN) 输出之间的已知参考负载(图 1中的 RREF) -TX)。如果线路未终止 (NT) 或电阻终止 (RT),则参考负载会发生变化。当 LINE 在 NT 模式下运行时,RREF_NT 被指定为 TXDP 和 TXDN 引脚之间的阻抗 10kΩ。NT 模式常用于低速通信,因为将高速信号驱动到高阻抗传输线可能具有挑战性。
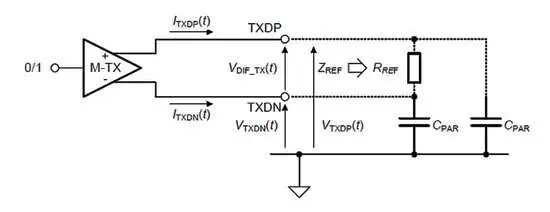
图 1. M-PHY 标准中指定的电压测量假设总线具有连接在 M-TX 的正 (TXDP) 和负 (TXDN) 输出之间的已知参考负载(图中的 RREF)。
高速和端接模式
当 M-PHY LINE 在高速模式 (HS-MODE) 下运行时,它很可能会被端接以化反射并模拟具有已知传输线阻抗的接收器连接。对于 LINE 的端接模式,M-PHY 标准将 RREF_RT 定义为 TXDP 和 TXDN 引脚上的浮动 100Ω 阻抗。
虽然 M-PHY 规范同时定义了 RT 和 NT 状态,但 HS-MODE 的一致性测试通常仅为 RT 定义。此外,M-PHY CTS 仅指定 RT 模式下的高速测试,指出高速数据测量(例如非端接信号上的抖动)通常不切实际甚至不可能。
需要时,可以使用高阻抗有源或差分探头测量未端接信号。这些示波器探头可以满足或超过 10kΩ 或更高阻抗的规格,适用于小于几 MHz 的信号频率。使用示波器在高速端接模式下测量 LINE 要求示波器或其探头尽可能靠近所需的 100Ω 差分端接。
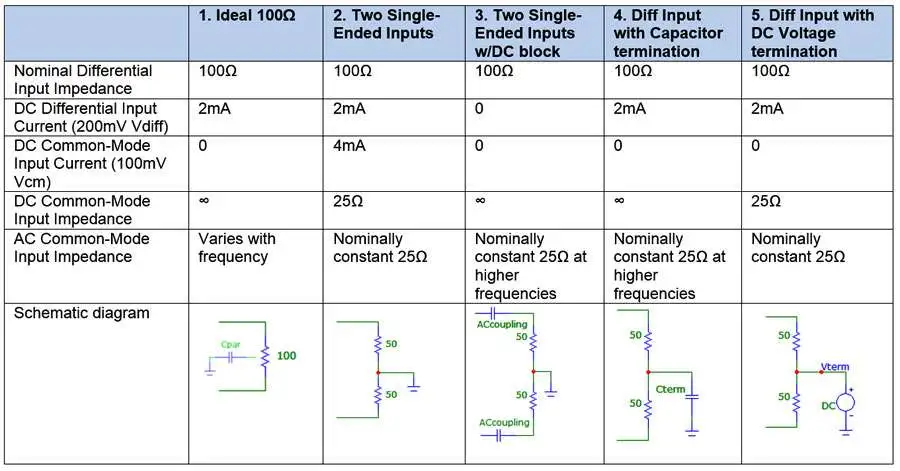
浮动 100Ω 终端是理想的,但由于设计中的寄生元件,在实践中很难实现。因此,已经提出了几种替代方法来实现标称 100Ω 差分终端以及足够的回波损耗和高共模阻抗,从而限度地减少发射器上的直流和交流电流消耗。表 1 列出了理想的端接和其他四种实用的备选方案。
点击图片可放大。
由于实际组件无法实现理想的浮动 100O,因此测试 M-PHY HS 信号的工程师必须决定其中一种实用的替代方案。每个备选方案都有优点和缺点。请注意,浮动 100Ω 终端具有共模阻抗,由于寄生元件,该阻抗在 M-PHY 感兴趣的频率范围内变化很大。共模电流和共模输入阻抗是备选方案显着不同的两个方面。所有替代端接方案都具有理想 100Ω 的差分特性,但表现出其他不良特性,如 25Ω 的高频共模输入阻抗。
将 M-TX LINE 直接连接到示波器的两个通道相当于双单端方法 (#2)。这种替代方案的缺点是会从发射器吸取共模电流,这可能会给发射器带来问题。在备选方案 #3 中,向双单端终端添加隔直电容器可解决直流共模电流问题,但必须谨慎选择电容器以确保终端满足 M-PHY 回波损耗规范。此外,使用阻塞电容会阻止 CTS 所需的 TX 上的 DC 测量。
两个替代方案通过不吸收直流共模电流来模拟理想的 100Ω 电阻器,但具有低共模阻抗 (25Ω)。然而,与浮动 100Ω 终端相比,这种方法允许更好地控制共模阻抗。如果与端接一起使用的电容器(备选方案 4,Cterm)足够大,交流共模阻抗将标称恒定在 25Ω。需要 100nF 才能从 1MHz 开始。
直流电压终端(选项 5,Vterm)功能包括探头或范围内的直流电源,并提供可调节的直流终端参考电平。将 Vterm 设置为 TX 的共模电压会导致没有 CM 电流,并且无需直流阻断器或偏置三通。然而,与直流阻断器不同的是,信号的直流电压仍然存在于探头或示波器输入端。使用 Vterm 可限度地减少直流负载。通过将端接电压设置为等于输入信号的直流偏置电压,可以消除探头直流负载。
根据图 2 所示的图形和值,参考负载 ZREF_RT 的回波损耗进一步指定了 GEAR 3 速度和更高速度下的 M-PHY 总线的终端。高回波损耗限制了来自 LINE 的不需要的反射,这些反射可能会 影响测量的质量。
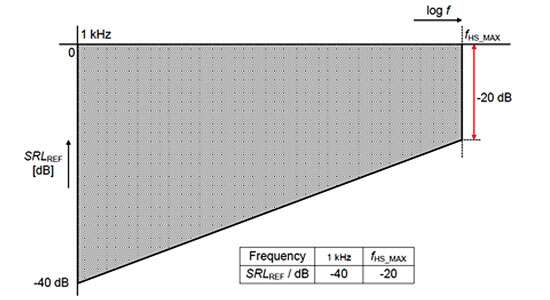
图 2. M-PHY 总线的终端由此处所示的参考负载 ZREF_RT 的回波损耗进一步指定。
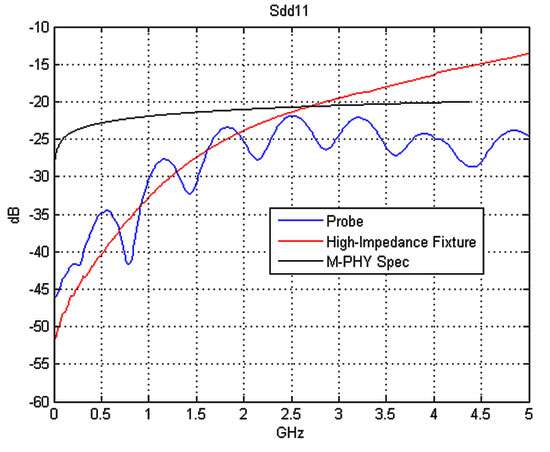
可能阻止探头或夹具满足回波损耗要求的问题之一是 100Ω 终端上的电容负载。回波损耗规范对理想 100? 上允许的串联和并联负载量设置了一些实际限制。终止,如 GEAR 3 的表 2所示 。

这些约束可以限制使用探头或示波器进行线路端接的选择。图 3 显示了两种终止方法和输入回波损耗。个是带有 50Ω 差分输入的探头(蓝色迹线)。第二个是连接到 100Ω 终端夹具(红色迹线)的高阻抗差分探头。在此示例中,以蓝色显示的探头保持在限制线以下,因此符合 M-PHY 规范。高阻抗夹具和探头不符合规范,因为它超过了 2.7 GHz 及以上的限制。
其他发射机测试要求
涵盖 HS-MODE GEARs 1-3 的 M-PHY 发射机测试包括:通道内偏斜、脉冲宽度、共模、总抖动和确定性抖动。M-PHY 发射器可以支持不同的驱动强度以努力节省电力。M-TX 测量在 CTS 中定义,M-TX 在大振幅 (LA) 和小振幅 (SA) 模式下运行。低幅度信号和测量抖动的需要导致要求探头和示波器获取具有快速边沿的低峰峰值电压信号。
在省电的小振幅模式下,M-PHY 发射器的输出峰峰值电压降至 280mV。必须在 M-TX 中控制转换速率以降低 EMI 噪声。但是,在高数据速率下限度地减少抖动需要边缘速度,这是 UI 的一小部分。
即使 TX 在大振幅模式下运行,M-PHY 信号的振幅也相对较小,为 0.5Vpp。获取这些低幅度信号需要具有高灵敏度的高带宽测量系统。此外,探头和示波器内的低附加噪声是进行测量的关键。
工程师如何才能减少探头和示波器添加到测量中的噪声?比较已发布的噪声规格是一个重要参数,探头衰减系数也是如此。高阻抗探头会在信号进入探头时衰减信号,以限制 DUT 上的负载。探头负载对于 M-PHY 不是问题,因为在运行终止模式时,预计总线将具有低阻抗 (100Ω) 差分负载。探头的衰减因子通过将测量的信噪比降低一个等于探头衰减值的因子来实现低噪声输入的目标。
探头类型比较
现在让我们在 5.8 Gb/s、低幅度(~200 mVpp)数据信号的示例测量中比较两种探头类型。个探头使用 50Ω、SMA 式输入。由于探头的负载不是问题,因此 SMA 型探头可用于获取 M-PHY TX 信号。第二个探头是高阻抗差分探头,带有 100Ω 终端夹具,连接到 TX 输出,然后连接到探头输入,如图4所示。
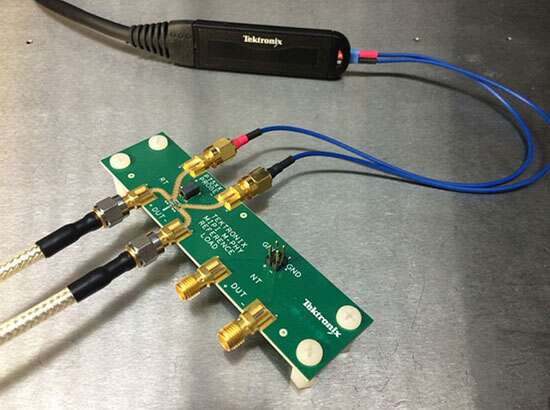
图 4. 在这个例子中,一个带有 100Ω 终端夹具的高阻抗差分探头连接到 TX 输出
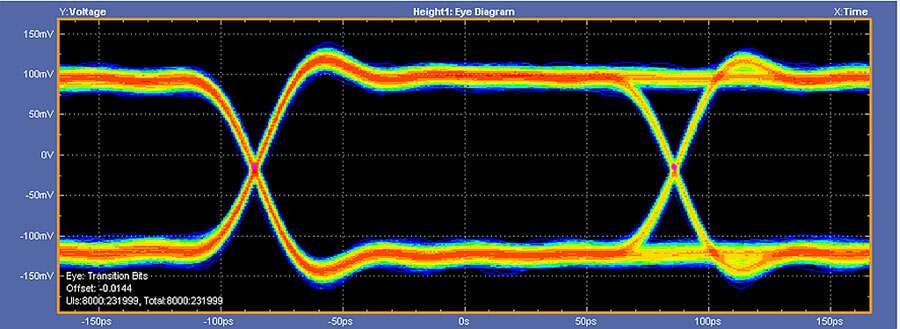
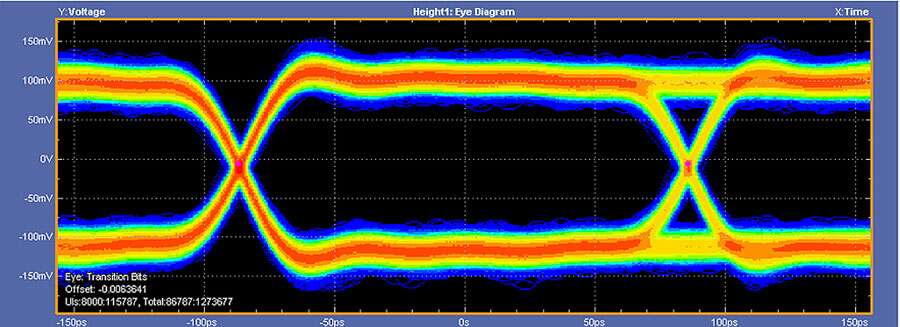
SMA 型探头优于高阻抗探头,因为它们的衰减设置远低于高阻抗探头。例如,可用的 SMA 型探头可以设置为具有 1X 或什至 <1X 的小振幅信号的衰减系数。具有类似带宽性能的高阻抗探头具有 5 倍的衰减。探头衰减越小,测量结果越干净,噪音越低。这种差异可以在眼图中看到。图 5 和图 6 比较了使用 50Ω 低衰减探头和具有 100kΩ 直流阻抗和 5X 衰减的高阻抗探头采集的相同 5.8Gb/s 信号。
点击图片可放大。
点击图片可放大。
图 6. 使用具有 100kΩDC 阻抗和 5X 衰减的高阻抗探头的 5.8Gbit/s 信号的眼图。
通过比较两个眼图中的“模糊”,您可以看到这两只眼睛之间的噪声差异。与使用高阻抗探头获取的眼图相比,使用 SMA 型低衰减探头获取的数据更清晰、模糊更少。两个眼图的测量参数证实,图 5中的眼图比图 6中所示的眼图更开放。例如,由于噪声较高,使用高阻抗探头时,眼图张度测量值降低了 18%。
示波器和探头噪声性能对于准确测量 M-PHY 信号的特性至关重要。如果没有低本底噪声,示波器和探头的其他功能将毫无用处,因为噪声会隐藏信号的关键特征。对于 M-PHY,测量系统的噪声性能至关重要,因为规范中定义了严格的幅度要求。在小振幅 (SA) 模式下,M-TX 峰峰值输出电压范围为 160mV 至 280mV。如果示波器和探头不具有低噪声且没有足够的灵敏度(12-15 mV/div,120 mV 满刻度),则逻辑电平之间的差异相对较小。
当达到前端硬件的限制时,一定要密切注意通过缩放信号显示来提高灵敏度的示波器规格。放大信号会增加信号的可见性,但不会增加灵敏度。缩放操作还会增加屏幕上显示的噪音。
上升时间
TX 上升时间 (20%/80%) 的 M-PHY 规范为 0.1*UI,相当于 GEAR 3 中的 17.2ps。但是,测量点 TX 信号的实际上升时间受电容限制封装和电路板走线。虽然可能不知道设备的实际电容,但如果其电容高达 CPIN_RX 的指定值 1.5pF,则 GEAR 3 信号的上升时间将从 0.1*UI 增加到接近 0.4*UI 的值( >70ps)。
理想情况下,探头和示波器应具有非常低的电容和比被测信号快 3 倍的上升时间。使用 GEAR3 的上升时间值,很难找到上升时间比 17.2 ps (0.1) 快 3 倍的示波器或探头*用户界面)。然而,找到上升时间比 70ps (0.4*UI) 快 3 倍的探头是一项更容易的任务。
由于实际上信号在探测点的上升时间可能比 17.2 ps 慢得多,因此验证 TX 输出不超过 M-PHY 规范中指定的 0.1*UI 限制可能是一项挑战。CTS 建议进行上升时间测量,然后使用去嵌入过程来消除 PCB 迹线、电缆和连接器中的任何信号损失。使用去嵌入,可以确定信号在 M-TX 引脚的上升时间,并确定 TX 是否满足标准要求。
从 M-PHY TX 输出的共模信号AC 和 DC 共模是不受欢迎的 EMI 。因此,测量 TX 输出端的交流和直流共模信号是 M-PHY CTS 测量的一部分。线路的浮动 100Ω 终端旨在提供一个没有接地路径的终端,共模电流可以在其中流动。如前所述,当今的 PCB 材料和组件无法实现这种理想的端接。
所有实用的终端方法都将在 M-PHY 频率上具有共模负载。此负载会衰减共模信号电平,必须对其进行去嵌入以进行准确的共模测量。共模负载越一致,越容易去嵌入负载效应。图 7 显示了前面比较的低衰减 SMA 探头和高阻抗探头和夹具的共模输入阻抗的两个示例。
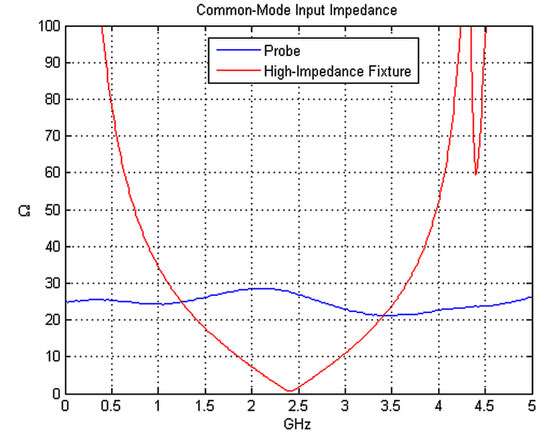
蓝线显示共模阻抗,从 DC 到 5 GHz(感兴趣的 M-PHY 频率范围)在 25Ω 以上或以下没有显着变化。而第二个探头(红色迹线)的阻抗在 DC 到 5 GHz 范围内变化很大。尽管在这两种情况下都会有直流电流流动,但对于共模测量,蓝色迹线中显示的探头负载的去嵌入只是一个缩放操作。考虑到 TX 源阻抗的分压比和探头的 25Ω 输入阻抗,使用该探头测量的共模电压应乘以 2。高阻抗夹具的共模解嵌任务是一项更复杂的操作。
测量要求总结
表 3 总结了用于测试以 HS 模式运行的 M-PHY 发射机一致性的测量设备的要求。
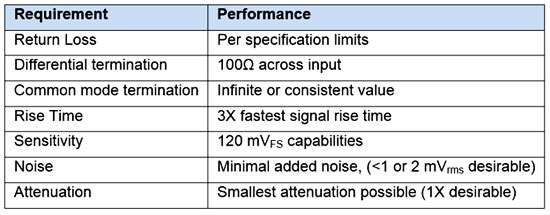
表3。这些是用于测试以 HS 模式运行的 M-PHY 发射机的一致性的测量设备的要求
MIPI M-PHY 标准对示波器和探测提出了重大挑战。这些挑战对 HS-MODE 测量提出了严格的要求。与高阻抗探头方法相比,50Ω、SMA 型探头已被证明可产生更好的结果,特别是对于 HS-G3 和 G4 速度。因此,版本的 M-PHY CTS 已更新,列出了对“SMA 探针”类型探测解决方案的支持。

-
FPGA数字信号处理之CORDIC算法2023-03-08
-
将测量与模拟相关联2023-03-06
-
为信号处理平台选择正确的硬件配置2023-03-06
-
今年政府工作报告释放的这10大信号,关系到汽车行业未来发展2023-03-06
-
王凤英加入小鹏汽车,传递出哪些新信号?2023-02-02
-
巴菲特减持比亚迪,套现96亿,什么信号?2022-11-14
-
继续套现39.5亿美元,马斯克又减持特斯拉,释放了什么信号?2022-11-11
-
汽车巨头大动作!宝马拟将部分MINI电动车生产线移至中国 什么信号?2022-10-17
-
中超控股:子公司新能源汽车电池管理系统复合信号电缆获实用新型专利证书2022-10-10
-
又一家整车巨头亲自下场造电池,总投资44亿美元,什么信号?2022-08-31
-
中国汽车惯性测量单元(IMU)需求增长,国产化替代加速2022-08-24
-
前沿观察: 市场回暖信号明显 中国新能源汽车产销创新高2022-07-28
-
十万亿赛道再获顶层支持!8只碳中和ETF一次性批出 什么信号?电动车利好政策多2022-06-29
-
电力设备与新能源行业周报:新能源车免征购置税政策释放延续信号 5月光伏新增装机维持高景气2022-06-21
-
工信部:7月1日起,无限速信号标志车型停止生产2022-06-10