
五部门关于开展2024年新能源汽车下乡活动的通知
特斯拉事故分析:自动驾驶的确存在漏洞
来源:新能源汽车网
时间:2016-07-06 11:01:20
热度:
特斯拉事故分析:自动驾驶的确存在漏洞刘健皓是汽车信息安全专家、360攻防实验室负责人、曾在2014年全球首例破解Tesla汽车,今年刚好有一个议题在美国的黑客大会(Defcon)上
刘健皓是汽车信息安全专家、360攻防实验室负责人、曾在2014年全球首例破解Tesla汽车,今年刚好有一个议题在美国的黑客大会(Defcon)上,就是讨论通过传感器对自动驾驶汽车的攻击,刚好也是拿Tesla做的例子。没想到在议题没讲之前就有事故发生。刘健皓剖析了整个事故原因,同时这个议题也会在今年8月16号ISC2016(中国互联网大会)上进行演讲。并且在中国互联网安全大会的HACKPWN黑客大会上将会现场演示破解特斯拉自动驾驶。
自动驾驶的原理是什么
首先我们来了解一下特斯拉汽车的自动驾驶原理,自动驾驶简单的来解释就是有传感器,控制器,和执行器组成。传感器负责感知周围的环境把信息传递给控制器,控制器结合各传感器的数据产生决策数据告诉执行器,让执行器执行控制请求。这样就可以通过感知路面的数据控制汽车自动行驶了。特斯拉的自动驾驶系统(Autopilot)传感器主要有以下几部分组成:
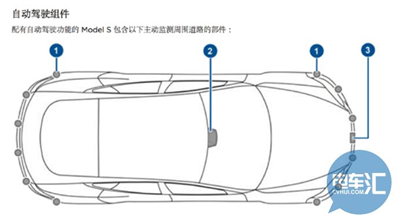
超声波传感器位于前后保险杠附近。
前视摄像头位于挡风玻璃上的后视镜下方。
雷达安装在前格栅中部。
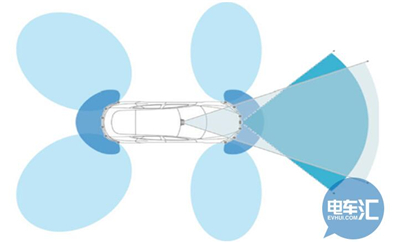
超声波传感器负责探测车周围的障碍物,经过我们测得超声波传感器能够感知的距离大概在5米左右,前格栅下面使用的是77G毫米波雷达负责探测车辆前端150米距离的障碍物情况。包括距离、车速等信息。前视摄像头负责识别道路车道线、标识、车辆速度等情况。除此之外还会通过高精地图等其它数据对道路情况进行判断,通过自动驾驶算法反向控制汽车实现的自动驾驶技术。从理论上看特斯拉的自动驾驶技术还是比较可靠的。
1 2 3 下一页>
-
致命自动驾驶的背后:特斯拉狂用新技术“圈钱”2016-07-05
-
无人驾驶技术触发信任危机 事故不止特斯拉2016-07-05
-
5年后汽车智能的首选或许不是特斯拉而是宝马2016-07-05
-
美国6月份电动汽车销量排行榜TOP5:普锐斯与特斯拉夺冠(图)2016-07-05
-
特斯拉事故引发的凝云:自动驾驶是终极目标?2016-07-05
-
深扒特斯拉自动驾驶死亡事故:为何那么迟才宣布?2016-07-04
-
特斯拉上季度全球销量14370辆 SUV占三分之一2016-07-04
-
自动驾驶命案:特斯拉Model S错在哪儿?2016-07-04
-
关于自动驾驶 特斯拉回应:还不完美2016-07-01
-
特斯拉计划与美国加油站合作 建更多超级充电桩2016-07-01
-
特斯拉计划与美国加油站合作 建更多超级充电桩2016-07-01
-
汉能李河君vs特斯拉马斯克:谁是汽车界的颠覆者?2016-06-30
-
【评论】特斯拉是如何被马斯克通过股权所控制2016-06-30
-
或将再现新风潮 丰田与特斯拉相继“跨界”2016-06-29
-
特斯拉风波与谣言不断 谁“偷”走了Model3圈来的钱?2016-06-29