
五部门关于开展2024年新能源汽车下乡活动的通知
【干货】分析自动驾驶汽车中的传感器
来源:新能源汽车网
时间:2016-08-15 01:00:06
热度:
【干货】分析自动驾驶汽车中的传感器 OFweek新能源汽车网讯 特斯拉在五月份发生的自动驾驶事故,和最近在Defcon上演示的如何干扰传感器,都充分说明了传感器在自动驾驶中的重要
OFweek新能源汽车网讯 特斯拉在五月份发生的自动驾驶事故,和最近在Defcon上演示的如何干扰传感器,都充分说明了传感器在自动驾驶中的重要性:环境感知是自动驾驶实现的基础,如果不能正确地感知周围环境,那么接下来的认知、决策与控制,都是空中楼台。
从传感器技术发展本身来说,要在接下来十年里保证自动驾驶车安全地上路,硬件性能与背后的软件算法,以及不同传感器之间的数据融合,都是需要提升的地方。
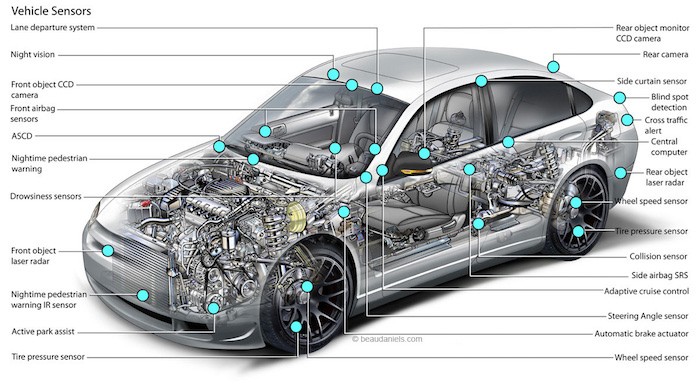
车辆上的各式各样传感器车辆上的各式各样传感器
传感器在自动驾驶的重要性无需赘言。
特斯拉的Autopilot系统通过摄像头、毫米波雷达与超声波雷达的融合数据来控制车辆在高速路车道行驶、变道以及根据交通情况调整车速。
谷歌的全自动驾驶测试车用的是价格昂贵、结构复杂的远距传感系统LiDAR(激光雷达)。
丰田透露过他们的高速道路自动驾驶汽车上有12个传感器:1个藏在内后视镜里的前摄像头,5个测量周围车辆速度的雷达,和6个探测周围目标位置的激光雷达5。
尽管也有一些企业另辟蹊径,希望通过V2X技术来完成环境感知的工作,但是V2X严重依赖于基础设施,而传感器则不受这个限制。
激光雷达
LiDAR系统使用的是旋转激光束。宝马、谷歌、日产和苹果的无人驾驶试验车用的就是这项技术。但要想在量产车上应用,价格必须大幅下降。业内普遍认为,再过几年这个目标就能实现。
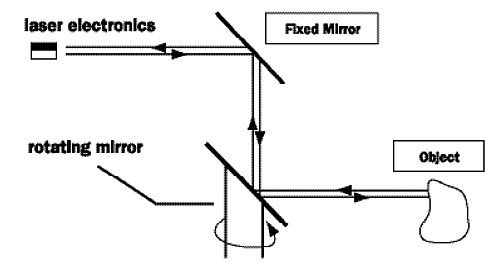
激光雷达工作原理
激光雷达的工作原理是通过发射和接收激光束来实现的。在其内部,每一组组件都包含一个发射单元与接收单元。上图的Velodyne使用了旋转镜面的设计。
这套发射/接收组件和旋转镜面结合在一起,能扫描至少一个平面。镜面不只反射二极管发出去的光,而且也能把反射回来的光再反射给接收器。通过旋转镜面,能够实现90到180度的视角,并且大大降低系统设计和制造的复杂度,因为镜面是这里面唯一的运动机构。
1 2 3上一篇:调研:新能源车主焦虑到底是什么?

-
加速刷新极限 特斯拉Model S 100D/P100D即将来袭2016-08-13
-
科技公司扎堆造新能源车 矛头直指特斯拉2016-08-13
-
探秘特斯拉超级工厂建设进程:50亿都花在哪了?2016-08-12
-
特斯拉事故中国车主:别再用“自动驾驶”糊弄人了!2016-08-12
-
不成功便成仁!看特斯拉的“困局”与“赌局”2016-08-09
-
奔驰将推出四款电动汽车 叫板特斯拉宝马2016-08-08
-
特斯拉与石墨烯的关系只有两个字:“猜想”2016-08-08
-
谈能源自由 先从特斯拉家用储能电池系统说起2016-08-08
-
【电动速递】特斯拉救主2016-08-08
-
【探究】特斯拉超级工厂的深层意义2016-08-08
-
深度:特斯拉电动汽车产业链详解(上)2016-08-06
-
点评特斯拉自动驾驶中国首撞 ADAS合作有戏?2016-08-06
-
【电动速递】特斯拉中国首撞2016-08-06
-
特斯拉高管评其他电动车:不比家电好多少2016-08-05
-
国内发生第一起特斯拉自动驾驶事故?!2016-08-05