
五部门关于开展2024年新能源汽车下乡活动的通知
What?自动驾驶竟是一个美丽的谎言?
来源:新能源汽车网
时间:2016-10-08 13:48:47
热度:
What?自动驾驶竟是一个美丽的谎言? 接二连三的交通事故表明,自动驾驶在目前来说还不具备商业化的可能,仍然只是一个停留在试验阶段的美丽谎言。自动驾驶这个概念越来越火。除了先驱
接二连三的交通事故表明,自动驾驶在目前来说还不具备商业化的可能,仍然只是一个停留在试验阶段的美丽谎言。自动驾驶这个概念越来越火。除了先驱者谷歌,特斯拉、路虎、奔驰、宝马等等汽车厂商都在研究创造“明天的高速公路火车”。日本就将于今年的8月底推出首款自动驾驶汽车——第五代Serena智能面包车。在国内,百度在之前也曾经表示2018年要推出商用的自动驾驶汽车。而根据最近的报道,腾讯富士康等公司合资成立了汽车公司和谐富腾计划已经开始融资,预备在2020年前推出自动驾驶的电动汽车。
但从目前特斯拉现阶段推出的“辅助性自动驾驶功能”运行情况来看,自动驾驶汽车并没有它所描绘的那样美好。从付诸商用到现在,特斯拉的自动驾驶已经不止一次导致了交通事故,今年5月的时候甚至发生了致死车祸。接二连三的交通事故表明,自动驾驶在目前来说还不具备商业化的可能,仍然只是一个停留在试验阶段的美丽谎言。
为什么这么说呢?
自动驾驶仍不具备自动处理复杂交通路况的能力
目前为止,不管是谷歌还是特斯拉,都不能自信的说自己的自动驾驶技术已经完善到能够适应所有的路况。这次特斯拉的致死事故发生时,就是这位车主的电动汽车在佛罗里达州高速公路上和一辆驶入他前方的18轮重型半挂卡车相撞。按理来说,在高速公路这种路况十分清晰的地方,面对一个18轮的重型半挂卡车这么庞大的目标,自动驾驶系统应该能够有效识别并进行规避。但事实是,它就这样撞了上去,就像是之前媒体报道的特斯拉的另外一起事故,车子就像是失控一样,突然加速向一堵墙冲了上去。
这样的情况并不意外。汽车自动驾驶技术之所以能够实现,主要就是依靠感知、控制和路径规划这三大系统技术。目前的自动驾驶汽车先是通过之前系统已经采集过的路况地图来规划路径方向,途中通过视频摄像头、雷达传感器以及激光测距器来了解感知周围的交通状况,并实时通过数据中心进行信息处理,遥控车辆利用控制中心的自动巡航系统、自动刹车、停车系统来实现开车、刹车、停车。
控制和路径规划技术都已经突破到一定的程度,可以实现像特斯拉汽车这样的辅助性自动驾驶了,但在感知路况和周围环境方面,还是一个难题。日本和NASA共同合作开发的Pro Piot自动巡航系统,目前也还只能实现单线车道的开车需求,在车变道方面还没有相应的系统,更不要说能够处理都市街道、十字路口这样复杂的路况了。
在自动驾驶方面投入研发最久的谷歌,在真实的路况中,谷歌无人驾驶汽车已经能够做到实时查看这样的3D路况场景,对物体进行准确的识别和区分。从下图中可以看到道路两旁的树、地面、和每条车道。虽然汽车通过这样的激光雷达和传感器,仅仅可以知道哪个位置有哪个物体,但是通过这样的感知,它还并不能智能到能够分辨下面的这些物体的突然性动作并进行规避。尽管看起来还不错,这个系统还并不能适用于现在这样复杂的路况。
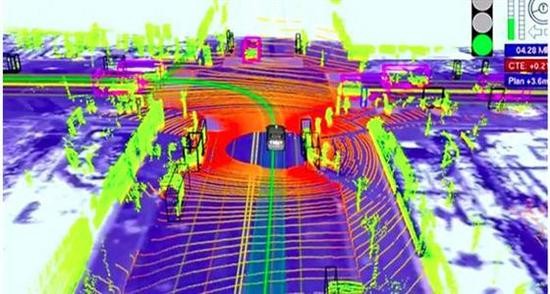
前段时间发布的一份有关无人驾驶汽车的报告中,展示了它的最新进展。通过车载激光雷达和其他传感器,无人驾驶汽车可以探测到各个方位的骑行者。从图片可以看到,探测范围360度并没有死角,无人驾驶汽车也已经能够做到对每一辆自行车进行单独追踪,并预测到骑行者的运行轨迹。这份报告其实也表明,谷歌的无人驾驶汽车才刚刚能够做到规避像是骑行者这样大体积的灵活运动体。如果面对的目标再小一些,是一个小孩,一个狗、一只猫或者其他东西,汽车可能并不能进行有效规避。
首页 下一页 上一页 尾页
-
主流传统车企攻势电动汽车 特斯拉地位不保?2016-10-06
-
浅谈动力电池续航:电动汽车的“拦路虎”2016-10-03
-
特斯拉在德国首次发生事故 否认因Autopilot造车车祸2016-09-30
-
特斯拉自动驾驶德国出车祸2016-09-30
-
第九批北京新能源汽车推荐目录发布 仅特斯拉入围2016-09-29
-
第九批北京新能源车推荐目录:仅特斯拉入围2016-09-28
-
解读特斯拉Model 3对电动汽车行业的意义2016-09-28
-
特斯拉 Model S P100D 400米跑进10.8秒2016-09-27
-
特斯拉竟不是苹果造车计划的最好收购目标?2016-09-27
-
盘点11家互联网造车企业:或想成“中国版”特斯拉2016-09-27
-
揭开特斯拉电池如何增加电量的秘密(下)2016-09-22
-
密歇根州禁止特斯拉电动车直销2016-09-19
-
特斯拉国内首起自动驾驶命案被告上法庭2016-09-19
-
聊比亚迪/特斯拉/北汽等电动车那些事!2016-09-19
-
奔驰拟在中国出售电动汽车 角逐高端市场2016-09-19